Harvard's new 3D printing technique for creating programmable artificial muscles/Nueva técnica de impresión 3D de Harvard para crear músculos artificiales programables
Source
Long gone are the days of robots that tumbled while climbing stairs, or even the Boston Dynamics robots that captivated us all with their acrobatic feats and their dancing and parkour skills. Now we see them as obsolete gadgets, and even their resemblance to anything "humanoid" was purely coincidental. Today's robots have a perfectly human form and a walk worthy of a Parisian fashion runway, and they will continue to improve until they become indistinguishable from us, thanks to new technologies like the one we're discussing today.
Lejos se han quedado aquellos robots que se caían de bruces al subir escaleras o incluso los robots de Boston Dinamycs que nos fascinaban a todos con sus cabriolas y sus habilidades para el baile y el "Parkour". Pero ahora ya los vemos como trastos obsoletos e incluso su parecido con algo "humanoide" era pura coincidencia. Ahora los robots tienen una forma perfectamente humana y un andar de pasarela de la moda de Paris y seguirán mejorando hasta hacerse indistinguibles de nosotros gracias a nuevas tecnologías como la que hoy comentamos.
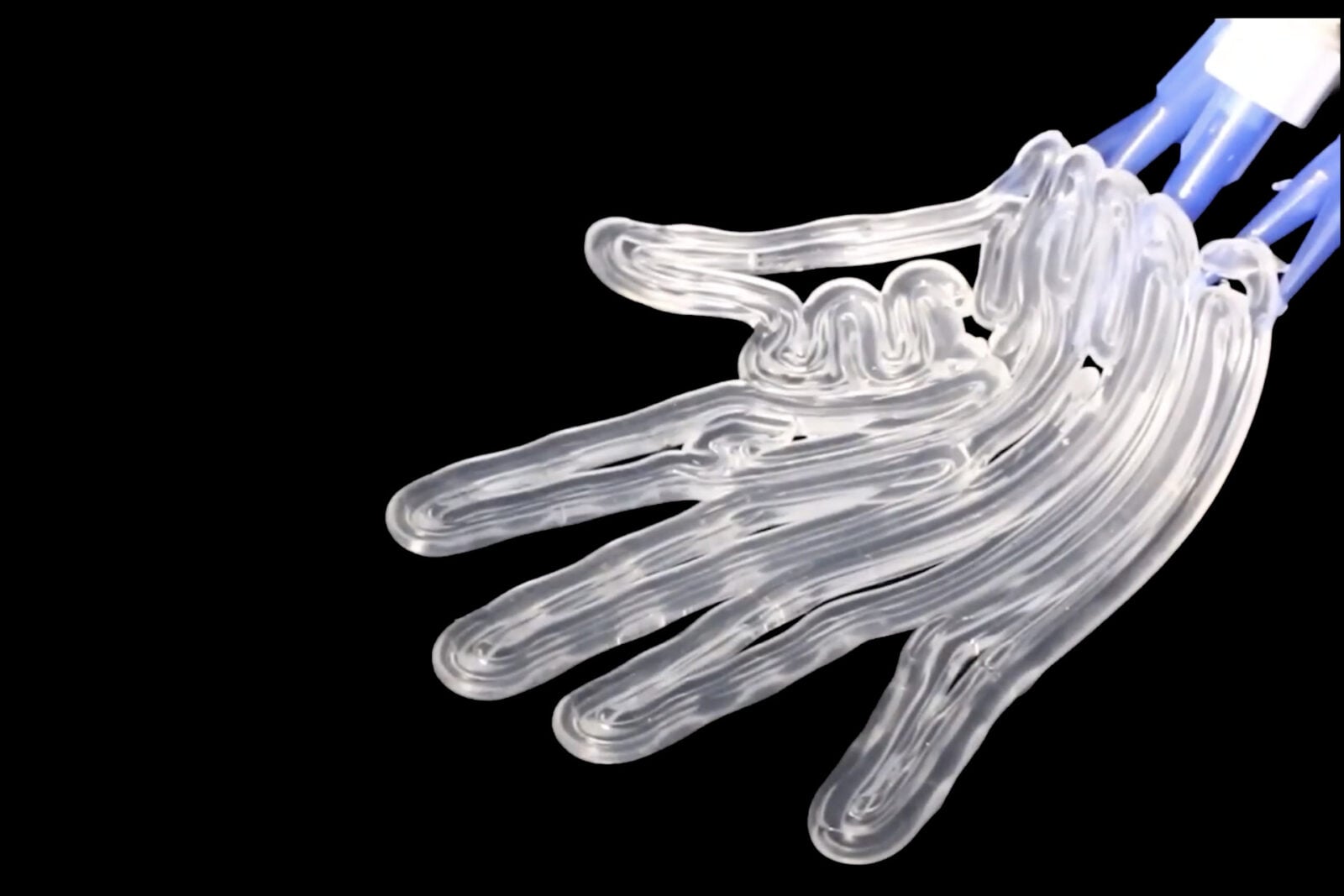
Recently, a team of researchers from Harvard University presented two very promising innovations in the field of "artificial muscles." Although often mentioned together, they are based on distinct principles and designed for different applications. One is pneumatic muscle, which functions like a highly sophisticated balloon. The interior is printed with a gel that is then washed away, leaving hollow channels. When pressurized air is introduced into these channels, the structure inflates and, thanks to the precise orientation of the channels, performs a specific movement (bending, twisting, or grasping).
Recientemente, un equipo de investigadores de la Universidad de Harvard ha presentado dos innovaciones muy prometedoras en el campo de los "músculos artificiales". Aunque a menudo se mencionan juntas, se basan en principios distintos y están diseñadas para aplicaciones diferentes. Por un lado están los músculos neumáticos que funcionan como un globo de larguero muy sofisticado. El interior se imprime con un gel que luego se lava, dejando canales huecos. Cuando se introduce aire a presión en estos canales, la estructura se hincha y, gracias a la orientación precisa de los canales, realiza un movimiento específico (doblarse, retorcerse o agarrar).
Source
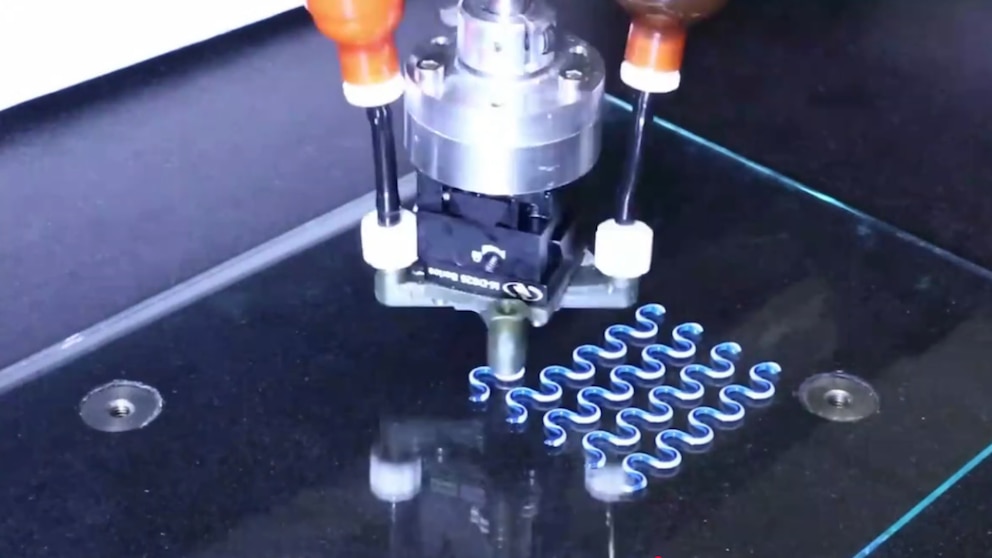
On the other hand, there are thermoactive muscles, which function like a biological muscle that contracts. They combine two materials in a single filament: one active and one passive. When heat is applied, the active material tries to contract, but the passive material limits it. This internal resistance is what generates the programmed twisting, bending, or stretching movement. Both types of "artificial muscles" are created using a technique called rotary multi-material 3D printing. The key to this technology is that the printer nozzle rotates while printing, embedding a helical pattern in the material that tells it how to bend or move later.
Por otro lado están los músculos termoactivos que funciona como un músculo biológico que se contrae. Combina dos materiales en un mismo filamento: uno activo y otro pasivo. Al aplicar calor, el material activo intenta contraerse, pero el pasivo lo limita. Esta lucha interna es la que genera el movimiento de torsión, flexión o estiramiento programado. Ambos tipos de "músculos artificiales" se crean mediante una técnica llamada impresión 3D rotativa de múltiples materiales. La clave de esta tecnología es que la boquilla de la impresora gira mientras imprime, incrustando un patrón helicoidal en el material que le indica cómo debe doblarse o moverse más tarde.
This technology is a significant advancement because it allows movement to be programmed directly into the material during printing, eliminating the need for complex and time-consuming assembly processes. This opens the door to revolutionary applications in various fields. In medicine and rehabilitation, it could be used to create ultra-flexible surgical tools that navigate the body without damaging tissue, or soft and lightweight prostheses and exoskeletons that perfectly adapt to the user's movements.
Esta tecnología es un avance importante porque permite programar el movimiento directamente en el material durante la impresión, eliminando la necesidad de procesos de montaje complejos y lentos. Esto abre la puerta a aplicaciones revolucionarias en varios campos. En medicina y rehabilitación servirían para crear herramientas quirúrgicas ultra-flexibles que naveguen por el cuerpo sin dañar tejidos, o prótesis y exoesqueletos suaves y ligeros que se adapten perfectamente al movimiento del usuario.

Source
In the realm of soft robots, the possibilities range from industrial grippers capable of handling delicate objects like eggs or fruit, to search and rescue robots that can squeeze through narrow gaps. The heat-powered version could be used to create filters that change their porosity at a specific temperature or self-transforming surfaces, opening up new possibilities in the field of adaptive materials. However, despite the enthusiasm, the technology is not yet ready for widespread use.
En cuanto al terreno de los robots blandos, podrían fabricarse desde pinzas industriales capaces de manipular objetos tan delicados como un huevo o una fruta, hasta robots de búsqueda y rescate que puedan colarse por rendijas estrechas. La versión que funciona con calor podría utilizarse para crear filtros que cambian su porosidad a una temperatura específica o superficies que se transforman solas, abriendo posibilidades en el campo de los materiales adaptativos. Pero, a pesar del entusiasmo, la tecnología aún no está lista para su uso masivo.
It is still necessary to ensure that these soft polymers can withstand millions of movement cycles without fatigue or breakage. Moving from a "bending" motion to millimeter-precise control for applications like surgery requires very fine refinement of the printing process and materials. The process must be reliable and reproducible to manufacture anything from a single prototype to hundreds of units, maintaining quality throughout all internal channels. In any case, this is a crucial step toward a future with safer, more adaptable, and more lifelike robots and tools.
Aún es necesario asegurar que estos polímeros blandos puedan soportar millones de ciclos de movimiento sin fatigarse o romperse. Pasar de un movimiento "que se dobla" a un control milimétrico para aplicaciones como la cirugía requiere un refinamiento muy fino del proceso de impresión y los materiales. El proceso debe ser fiable y reproducible para fabricar desde un único prototipo hasta cientos de unidades, manteniendo la calidad en todos los canales internos. De cualquier forma, este es un paso crucial hacia un futuro con robots y herramientas más seguros, adaptables y parecidos a los sistemas vivos.
More information/Más información
https://gizmodo.com/new-technique-for-3d-printing-artificial-muscle-paves-the-way-for-more-freaky-robots-2000724201
Que interesante innovación aunque aún falta mucho terreno por andar para perfeccionarlo, ofrece grandes esperanzas sobre todo en el campo de la medicina creando instrumentos quirúrgicos capaces de navegar por el cuerpo sin dañar tejidos o generar prótesis mucho más adaptables al movimiento del cuerpo humano lo que representaría un gran reto en la medicina de rehabilitación.
Gracias por compartir tan interesante artículo..!
0.00 SBD,
0.57 STEEM,
0.57 SP